二、增加播放指定TTS语音的话题0x00新增功能简介在前面文章中介绍过,这款语音模块不具备本地实时文本转语音(TTS:TexttoSpeech)功…ROS2离线语音交互模块3小时前 corvin_zhang 900
一、ROS2离线语音交互模块-快速上手0x00语音交互模块简介最近一直在研究做一款双足机器人,在添加语音交互功能时,尝试了很多方案都不是很满意。总结下来的几…ROS2离线语音交互模块3天前 corvin_zhang 4700
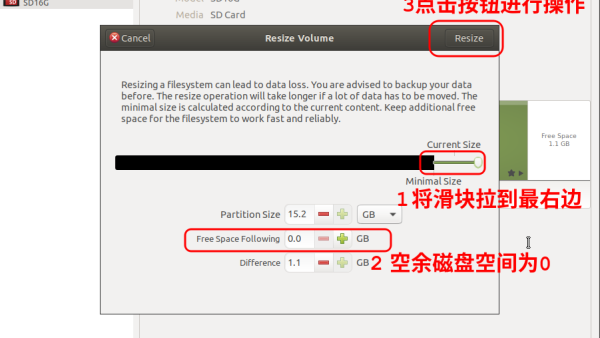
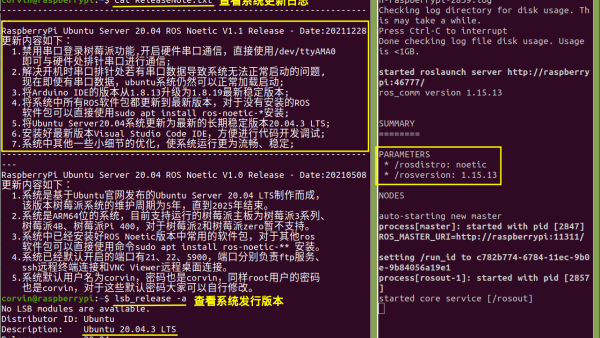
UbuntuServer20.04树莓派ROS1 Noetic系统使用注意事项0x00系统解压在系统下载后,第一步先是将xz压缩镜像解压成.img结尾的镜像。只有.img结尾镜像才能直接烧录到microSD卡里,…树莓派ROS系统镜像1年前 corvin_zhang 1.44K00
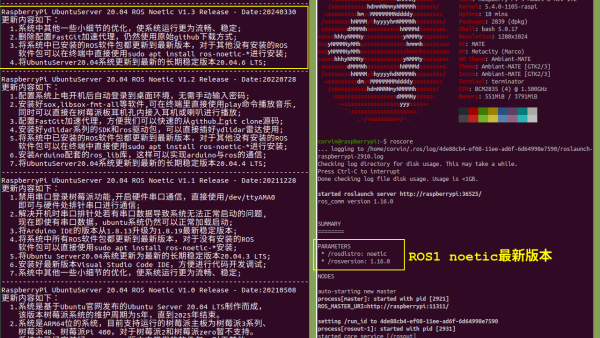
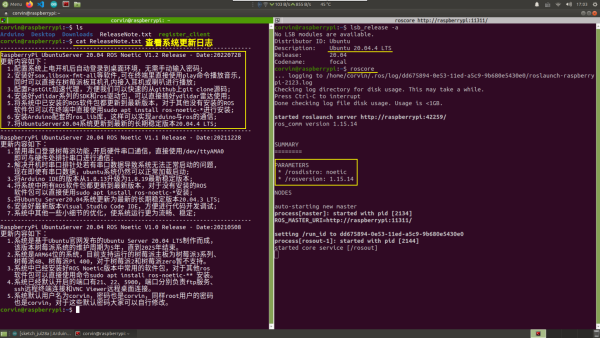
发布基于UbuntuServer20.04的树莓派ROS1 Noetic V1.3桌面版系统0x00系统简介本次发布的系统主要是解决上次版本的一些稳定性问题,同时将系统各软件更新到最新版本,我们发布的这个ROS…树莓派ROS系统镜像1年前 corvin_zhang 1.43K00
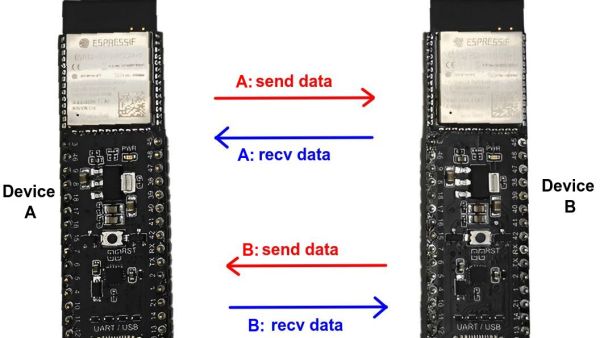
基于Arduino在ESP32 S3上使用ESP_NOW实现设备间通信0x00什么是ESP_NOW?ESP-NOW是乐鑫定义的一种无线通信协议,能够在无路由器的情况下直接、快速、低功耗地控制智能设备。它…ESP32-S3入门教程2年前 corvin_zhang 6K00
基于Arduino IDE环境ESP32 S3控制舵机转动0x00什么是舵机首先我们需要明白什么是伺服电机,伺服电机主要靠脉冲个数来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1…ESP32-S3入门教程2年前 corvin_zhang 1.07W00
在Arduino IDE中合理配置ESP32-S3运行参数0x00概述按照上篇教程搭建好ESP32的arduino开发环境后,虽然我们可以给开发板下载程序,查看到程序运行效果了。但其实并没有完…ESP32-S3入门教程2年前 corvin_zhang 2.03W00
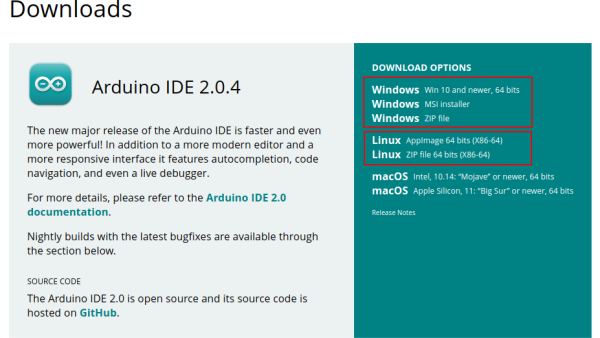
搭建ESP32的Arduino开发环境0x00概述ESP32-S3芯片采用40nm工艺制成,具有极佳的功耗性能、射频性能、稳定性、通用性和可靠性,适用于各种应用场景…ESP32-S3入门教程2年前 corvin_zhang 8.90K00
初识ESP32-S3芯片0x00ESP32-S3的背景ESP32-S3 是乐鑫发布的一款集成2.4GHzWi-Fi和Bluetooth5…ESP32-S3入门教程2年前 corvin_zhang 8.25K00
发布树莓派Bullseye 64bit ROS Noetic V1.0桌面版系统0x00系统简介这次发布的系统是基于树莓派官方发布的Bullseye64位系统来制作的,对于ROSNoetic各软件包都是使用最新…树莓派ROS系统镜像2年前 corvin_zhang 2.85K20
发布基于UbuntuServer20.04的树莓派ROS Noetic V1.2桌面版系统0x00系统简介本次发布的系统主要解决上个版本中的一些小问题,对系统的一些软件包进行升级,配置优化使系统运行更为稳定。同时还有小伙伴想…树莓派ROS系统镜像2年前 corvin_zhang 2.54K110
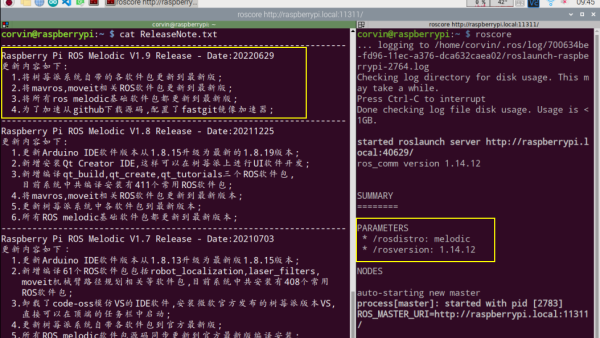
发布树莓派ROS Melodic v1.9桌面版系统0x00系统简介本次发布的新版本系统是将所有的ROS软件包源码更新到最新版本编译而成,并没有新增编译ROS包。本次发布的新版本并没有亮…树莓派ROS系统镜像3年前 corvin_zhang 2.31K130
10.树莓派AI语音板完美运行wukong-robot0x00wukong-robot介绍wukong-robot是一个简单、灵活、优雅的中文语音对话机器人/智能音箱项目,目的是让中国的…树莓派AI语音开发板3年前 corvin_zhang 4.67K170
发布基于UbuntuServer20.04的树莓派ROS Noetic V1.1桌面版系统0x00系统简介本次发布的系统主要是解决上个版本中遇到的一些问题,如硬件串口通信问题,现在可以直接使用/dev/ttyAMA0进行串口…树莓派ROS系统镜像3年前 corvin_zhang 2.81K160
发布树莓派ROS Melodic v1.8桌面版系统0x00系统简介本次发布的系统新增编译了3个ROS软件包,就是在1.7版本中有小伙伴提出的qt_create、qt_build、qt_…树莓派ROS系统镜像3年前 corvin_zhang 2.75K140
2.Mini六自由度IMU板代码升级与问题汇总(一)我们的Mini六自由度IMU板许多购买的同学已经收到并使用起来了,我们汇总了同学们在使用的过程中遇到的问题,并对IMU板代码和手册进行了小幅度升…Mini六自由度IMU板3年前 corvin_zhang 2.47K150