7.在STDR中使用hector_mapping构建2D地图0x00hector_mapping简介hector_mapping是一种SLAM算法,它可以在没有里程计的情况在未知环境下构建当前环境的地…STDR仿真6年前55
6.在STDR中配置planner路径规划器参数0x00为何需要路径规划?现在我们已经可以构建当前环境地图,可以实现机器人在当前地图中的定位。那接下来就可以在地图上给定目标点,开始规划路径…STDR仿真6年前55
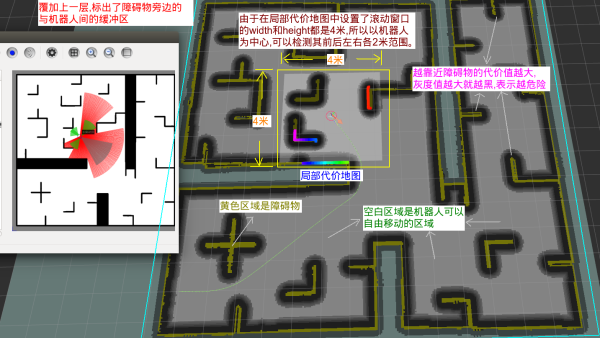
5.在STDR中学习costmap代价地图0x00什么是costmap代价地图在机器人进行路径规划时,我们需要明白规划算法是依靠什么在地图上来计算出来一条路径的。依靠的是gmappi…STDR仿真6年前82
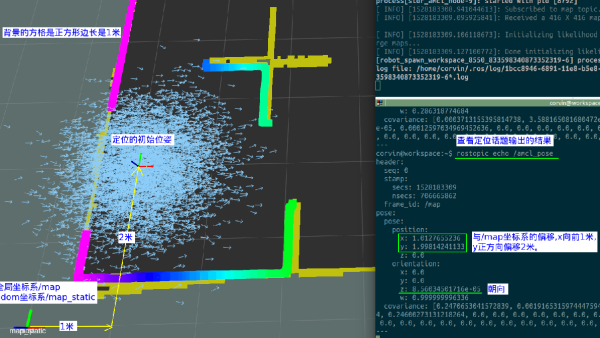
4.在STDR中使用amcl进行仿真机器人定位0x00为何需要对机器人进行定位?要想实现移动式机器人的自动导航需要完成以下六点,当然这些信息是我自己总结的仅供大家参考:(1)一张完整的…STDR仿真6年前81
3.在STDR仿真器中使用gmapping构建2D栅格地图0x00gmapping简介gmapping是一种高效的Rao-Blackwellized粒子滤波器,用于根据激光雷达测距数据来生成2D珊格…STDR仿真6年前122
2.使用STDR进行ROS小车超声波避障策略仿真实验0x00什么是仿真实验在没有真实物理实体实验设备的情况下,通过在计算机上用软件模拟真实设备运行的效果,这就叫做软件仿真实验,用软件仿真是一条…STDR仿真7年前64